Welcome to Daniska Projects. Here you can find a collection of engineering and electronics projects by Taylor Daniska.



Top Projects


YouTube
Be sure to check out the Daniska Projects YouTube channel for more content.
All Projects
- Mow-Kart (Lawn Tractor Upgrades)

- Astral Plane Distortion Pedal

- Server Rack

- Custom Backup Server

- Custom Workbench

- Cebora MIG Welder Repair

- Cyberdeck

- Raspberry Pi Weather Station

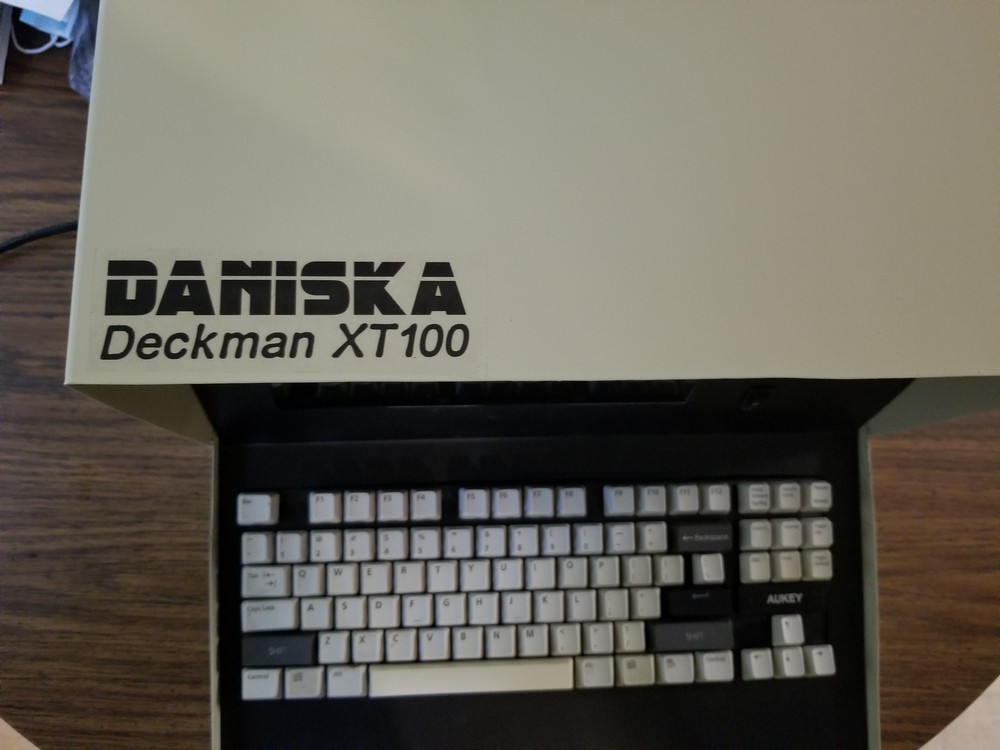
- Raspberry Pi Terminal (Deckman)
- Electronics Activity Table

- Rangemaster Clone

- Aluminum Casting Forge

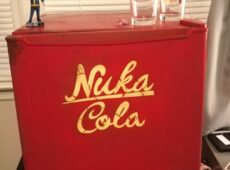
- Fallout Themed Fridge
- Fallout Themed Radio

- Corpse Skeleton

- Custom Guitar Hanger

- Solder Reflow Oven

- Skyrim Steel Longsword Replica

- Hot Fuzz

- Weapon Rack

- Wah Pedal

- The Writ Overdrive Pedal

- Skyrim Daedric Dagger Replica
